Friday’s flight ended in a tree, but in the seconds before that crash, I had the idea for the first time that I might just be able to fly this thing. I thought about it all weekend, and resolved to never again fly without the GoPro.
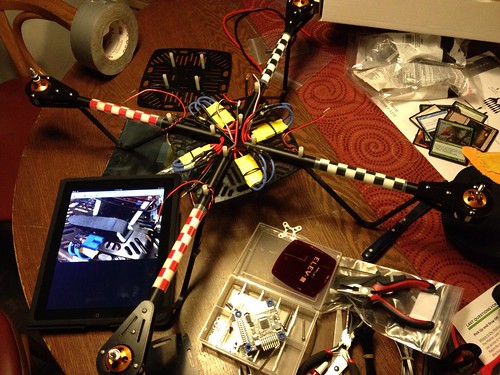
This morning, I strapped the camera to the bottom of the aircraft, and headed down to the loading dock behind the bookstore. I’m actually starting to get the hang of this thing, though I am still seized with a tiny bit of panic when first it jumps into the air, and sometimes when it seems to make its own decisions. Nevertheless, I was able to execute seven or eight successful – successful here being defined as flights that don’t end in repairs – takeoffs and landings. Here’s video from the best one:
To do:
Tweak the camera settings to limit the width of the angle
Come up with a better way to secure the camera to the quadcopter – as it is, I’ve zip-tied it to the bottom, but have to waste a tie each time I remove the camera.